


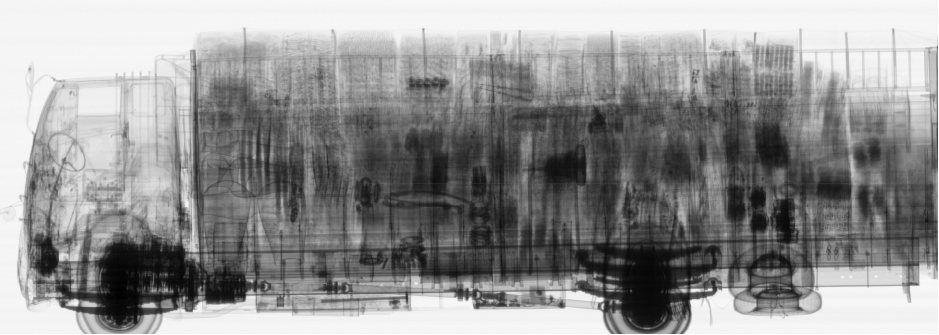
Sistema di ispezione di carichi e veicoli rilocabile
Il sistema di ispezione di carichi e veicoli rilocabili BGV6100 è dotato di un acceleratore lineare elettronico (Linac) e di un nuovo rilevatore di solidi PCRT, che utilizza raggi X a doppia energia e algoritmi avanzati di identificazione dei materiali per ottenere la scansione prospettica e l'imaging di carichi e veicoli e identificare merci di contrabbando.Il sistema ha due modalità di funzionamento: modalità drive-through e modalità di scansione mobile.Nella modalità di scansione mobile, il sistema si sposta sulla rotaia a terra per scansionare i veicoli merci.L'implementazione del sistema tiene conto della comodità dell'uso in loco.Una console operativa è posizionata all'ingresso del veicolo.Il personale della guida front-end è responsabile dell'avvio del processo di ispezione dopo che il veicolo è pronto e può osservare l'intero processo di ispezione durante tutto il processo.Una volta rilevata un'anomalia, il processo di ispezione può essere interrotto immediatamente.Dopo aver completato l'interpretazione dell'immagine dell'immagine del veicolo, l'interprete dell'immagine del veicolo posteriore può comunicare con la guida anteriore attraverso la console e può fornire il risultato dell'interpretazione attraverso il corrispondente segnale di avviso.
- Maggiore produttività, non meno di 120 veicoli cargo all'ora in modalità drive-through e non meno di 25 veicoli cargo all'ora in modalità di scansione mobile
- Protezione dalle radiazioni per il conducente, ha la funzione di esclusione automatica della cabina del camion e un interruttore a chiave per la modalità di scansione mobile
- La tecnologia IDE supporta la discriminazione dei materiali
- Abbondante interfaccia di integrazione del sistema
- Maggiore capacità di penetrazione dell'acciaio
- Sistema avanzato di gestione delle informazioni sulle immagini.L'archiviazione, il recupero, la visualizzazione, l'esportazione e altre funzioni delle informazioni sul veicolo, comprese le immagini prospettiche, supportano le funzioni di gestione centralizzata in rete.
- Interfaccia operativa del client: il design dell'interfaccia operativa del client del sistema software dell'apparecchiatura è ragionevole e facile da usare, l'interfaccia è chiara e concisa, il funzionamento è conveniente, la configurazione del modulo funzione è intuitiva, il layout è ragionevole e la manutenzione è facile.
Categorie di prodotti
-

Sistema di ispezione del carico e del veicolo(Betatron)
-

Sistema di ispezione di carichi e veicoli stazionari
-

Risolto il problema con il sistema di ispezione del backscatter
-

Sistema mobile di ispezione di carichi e veicoli
-

Ispezione di carichi e veicoli semoventi...
-

Sistema di ispezione dei veicoli passeggeri